
「自動運転車両でのレース」プログラムの現状は公道「レベル4」と同様の“よちよち歩き”
ー今の「自動運転開発」に欠けている、未来への『鍵』は…
新領域に可能性を求める中東の政略は「運転」にも
アブダビ(アラブ首長国連邦)に本拠を置くASPIRE社が中心となって、自律走行車両による”レース”を目指す「A2RL(AbuDhabi Autonomous Racing Leagueの略)」が動き出している。2023年にまず計画概要を公表。2024年下旬にはアブダビのヤスマリーナ・サーキットで複数の参加チームが実車を走らせてコースを”学習”させ、4月27日に4台の車両が同時に走行する8周の”レース”が行われた。
その車両として、日本のトップフォーミュラであるスーパーフォーミュラ(SF)の現用マシン、「SF23」が選択され、日本SF選手権シリーズの主催者である日本レースプロモーション(JRP)はA2RLとの間に提携関係を結んでいる。この関連から、2024年11月16−17日にスーパーフォーミュラの年間シリーズ最終2連戦が「JAFグランプリ」として開催された鈴鹿サーキットに、A2RLの開発車両が持ち込まれて走行デモを実施。タイトルの写真(提供:JRP)はそのデモ走行前日に行われた確認走行でのカットで、前を行くのが”ロボットカー”、後方の紫色の車両が「ヒューマンカー」で、こちらを運転した元F1ドライバーのD.クビアト(プログラム全体のドライビング参照担当でもある)によれば「ロボットカーの走りを観察して、そのラインと速度から並べる場所、抜いていける場所を判断する」とのこと。
報道関係者向けには車両も公開されたので、そこで確かめることができた内容を紹介する。最初に書いておくなら、今回の観察結果もまた、今日の「自動運転(Autonomous Driving)」開発に共通する根本的な欠落、認識不足を再確認しただけだったのであって、本稿では、その指摘と同時にその現状を打破するためのヒントも書き加えることになるかと思う。
まず車両だが、先ほども触れたように骨格と外装はSF23を使用。つまりレーシングかー・コンストラクターであるダラーラ社が開発・製造した、現時点におけるフォーミュラカーとしては世界的にも「F1直下のカテゴリー」と言えるものであって、その主骨格をなすCFRP成形モノコックタブ、トランスアクスル、そして200km/hで20000Nにも達する空力ダウンフォースを発生する外装パーツ一式、そしてサスペンション機構もSF23そのままである。
パワーユニットはさすがにSFで2014年以来使われているNRE(Nippon Racing EngineーSF選手権ではトヨタとホンダが供給。物理的燃料リストリクターを前提に開発された純レーシングエンジン)というわけにはゆかず、シビックTYPE-Rに搭載されているホンダK20Cをベースにアメリカ系チューナーが改造したものを搭載している。SF14/19/23の車両レイアウトは直列4気筒エンジンを基本に構築されたものであり、そこに収まり、かつ車両を準備し走らせる時に「あまり手がかからない」ことも考えた選択だと思われる。とはいえ現代のフォーミュラカーではエンジンがモノコックとリアアクスルの間をつないで旋回時には4Gを超える曲げ応力を受け止める「構造体」となるので、それに対応するヘッドまわりとクランクケースは作っているものと思われる(今回、この部分のカウルを外すことはなかったので未確認)。A2RLの発表資料によれば、排気量2L+ターボ過給で最大500ps、とのこと。バックストレート端での到達速度を現役SF23と比べつつ見たところでは、いちおうこのくらいの出力は出ていそうではあった。
ちなみにこの週の木曜日には、HRCが手持ちのSF19車体を使って組んだ車両で、K20Cをベースに、純競技車両用として車体骨格化にも対応、自然吸気で300psからターボ過給で500psレベルまでを作り分ける企画で開発中のパワーユニットのテスト走行を行っていたが、A2RLとの関係は現状全くない、とのこと。
さて、本題のAutonomous Driving=自律走行のほうだが、この週末の土曜日には「ロボット」車両2台が少し離れて連なっての走行デモを実施。続いて日曜日には「ロボットvs人間」ということで、F1参戦経験もあるダニー・クビアトが操る同仕様の車両との接近走行、のはずだったのだが、「ロボット」のほうがその最初の周回、レース関係者流にいえばアウトラップ(まだピットアウト/インは行わずにストレート上に押し出されたところから走行開始)のヘアピンでスピン、ガードレールにクラッシュして、このデモランはそのまま打ち切りとなった。そこで何が起こっていたかの推定は後でするとして、まず車両側の主要センシングデバイスから紹介していこう。
周辺認識のための「眼」は…
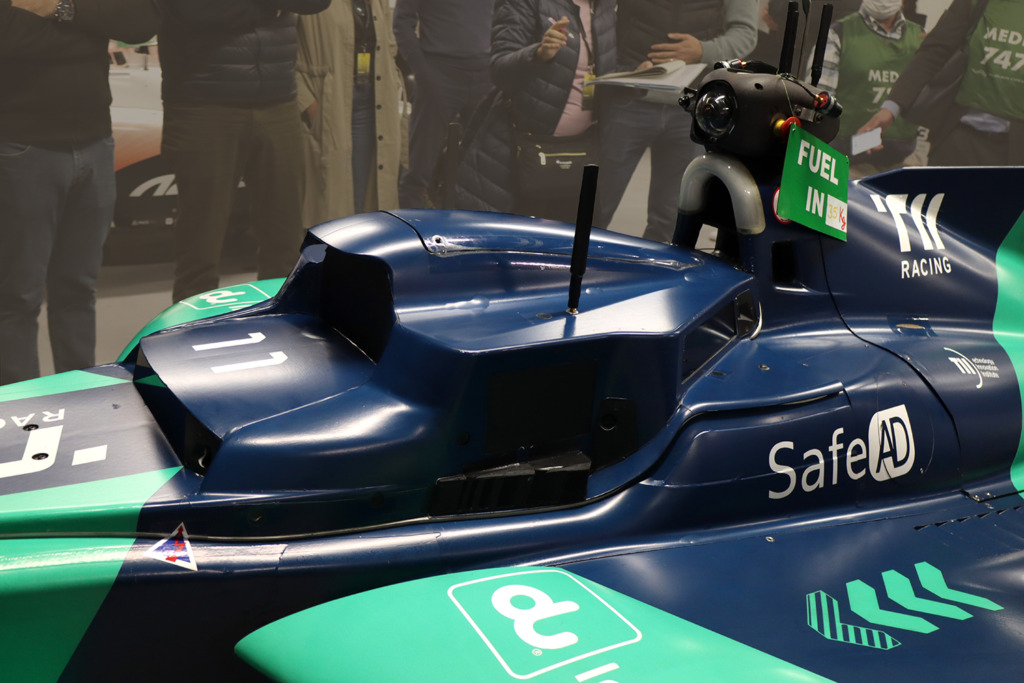
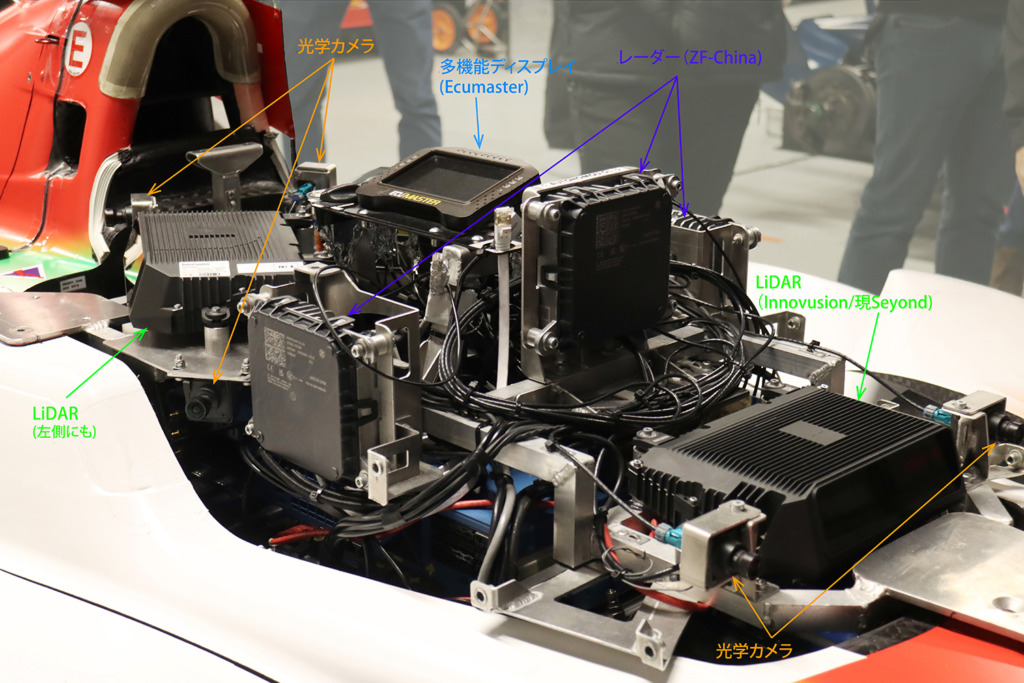
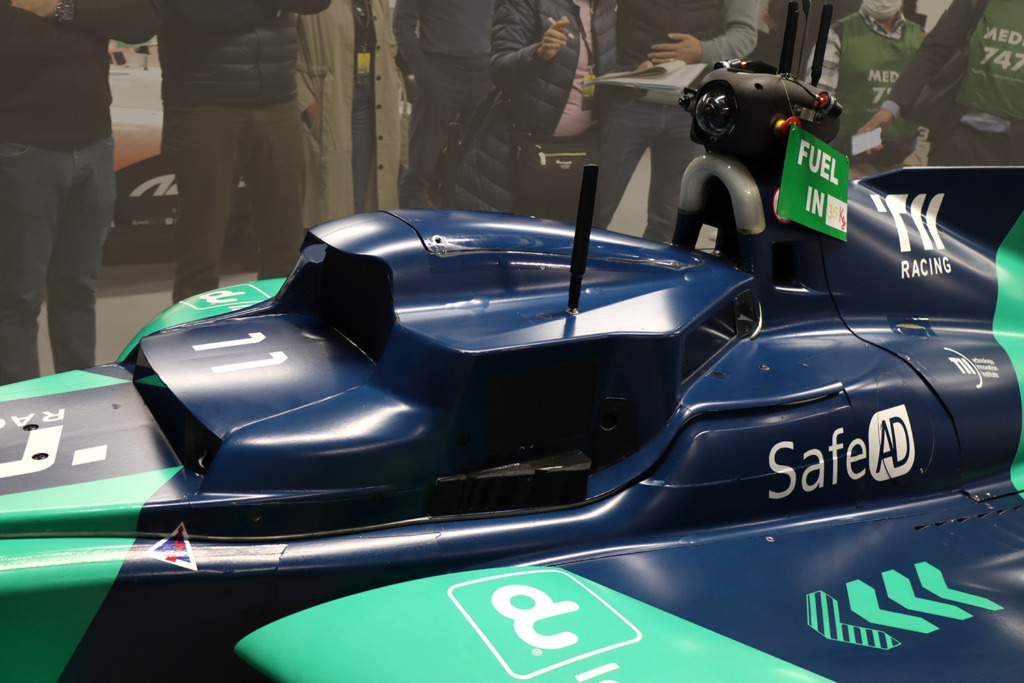
モノコックタブの開口部、元々はドライバーのヘルメットと腕が見える部分に、ロボットとしての「眼」が組み込まれている。
まず光学的に映像と距離を検出するLiDARが3基、正面と両サイド斜め後方に向けて配置されている。水平方向に細長い「窓」が開いているタイプで、ということは自動運転開発・試験車両で多用されている回転スキャン型ではなく、固定水平スキャン型。ユニットの刻印によればInnovusion(現在はSeyond)の”Falcon K”と見られる。
その上段、人間なら頭部を囲む形で電波レーダーが前向きと左右の3面。さらに車両後端に突き出すクラッシャブル・ストラクチャー端面にもうひとつ。合わせて4基はZF-Chaina製で、SAIC(上海汽車)に供給しているイメージング・レーダー(https://press.zf.com/press/ja/releases/release_48960.html)と同一品だと思われる。
さらに小型の映像カメラがこのコックピットを取り巻くように片側3基ずつ、そして後方クラッシャブルストラクチャー後面・レーダー直上にもう1基の合計7基を配している。
これらに加えて自車の地図上位置を検出するためのGPSセンサーが、コックピット前方とロールフープ上の2基設置されている。精密計測が可能ならばこの二つの計測値を合わせて車両の向き、車体横すべり角も計算できるはずだが、この配置と間隔では難しいだろう。ちなみにロールフープ上にはGPSアンテナと合わせて球形の透明カバーで覆われたカメラも装着されているが、これはロボット用視覚センサーではなく、車両のオンボード映像を送信するためのもののようだ。
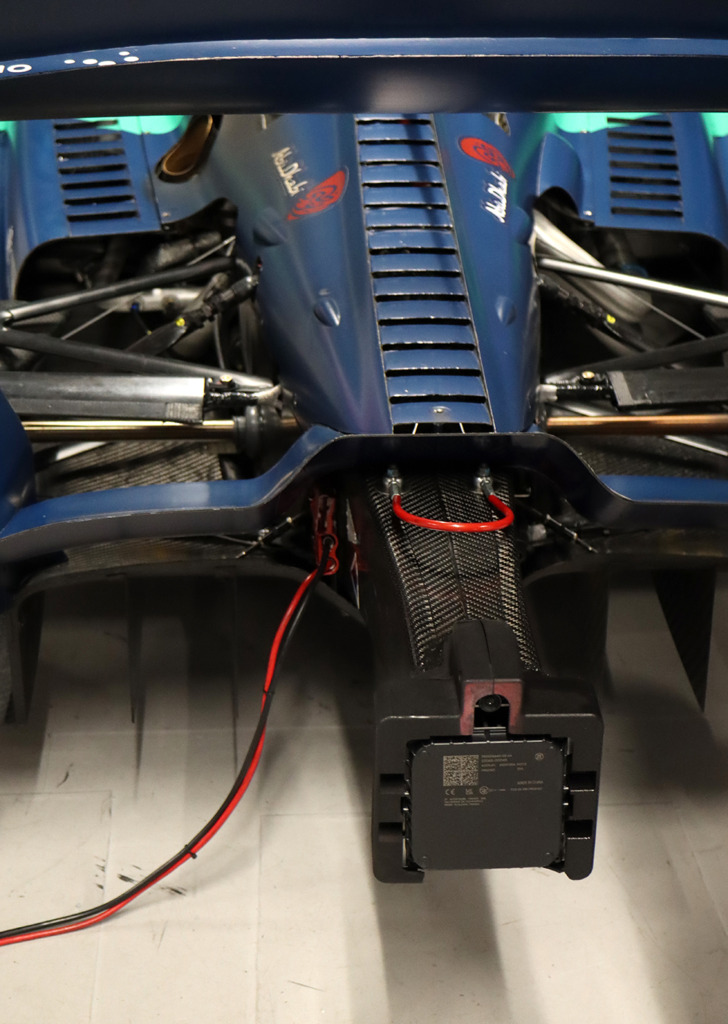
これらのイメージング・センサーがドライバーにとっての「眼」となる一方で、その下の空間には青い外郭の箱状部品などが見えているので、ドライバーの身体が収まる空間にはまず車両運動センサー、つまり重心点まわりの3軸回転運動と3軸各方向の加速度センサーなどが組み込まれ、AIのコアとなるプロセッシングユニットもこの空間に収められているはずである。それらに加えて、操舵機構に直結するモーター、ブレーキペダルに相当するマスターシリンダーへの加圧機構もモノコック内殻全部に組み込まれる。トランスミッションの変速とクラッチ操作は、SF23ではトランスミッション側に設置された空圧シリンダーで行い、人間ならばステアリングホイール裏側の”パドル”で操作するのだが、これは運転制御プロセッサーからの電気信号だけですむ。
こうした「自律走行」のためのセンサーやプロセッサー、アクチュエーター類の重量はまとめておよそ90kg。ヘルメットや耐火スーツで武装したドライバーの平均よりは「ちょっと太った」程度になっているという。
現状は「大学生+αのプログラミング・コンテスト」
実際の「コンペティション」は、これらのハードウェアを使い、ROS(ロボットOS)2で組まれた基本プログラムに対して、参加各チームが独自のアレンジを加え、車両に実装したところで戦われることになる。マシンのほうは主催者側で同一のコンポーネンツを組み立て、サスペンションやエアロダイナミクスのセッティングも同一に仕立てたものをそのまま走らせる。つまりスーパーフォーミュラをはじめとする今日のモータースポーツで重要な要素となる、コースや刻々の状況に対応した「セットアップ」については、各チームが手を入れることなく、いうならばASPIRE社が概略を構築したROSをベースに実走〜競争に対応させる、プログラミング・コンペティションなのである。
初年度は前述のように、競争としては4チームが実走した1回のみだったが、2025年の”シーズン2”ではまず4月にヤスマリーナ・サーキットでのレース開催と、参戦に向けて動き出した14チームのリストが公表されている。そのチームとは…
•中国&UAE:Fly Eagle
•フランス:Aladin Innovation
•ドイツ:ミュンヘン工科大学
•ドイツ:コンストラクター大学
•ハンガリー:HUMDA Lab
•イタリア:Polymove
•イタリア:Unimore
•日本:セルブス・ジャパン(TGMグランプリ)
•シンガポール&UAE:Kinetiz
•米国:AiPEX Racing
•米国:Code 19 Racing
•UAE: Technology Innovation Institute (TII)
新たに「日本」からの挑戦者が名乗りを上げているが、このセルブス・ジャパンとは、1999年創設・2004年に日本の非メーカー系レーシングチームとしては今のところ唯一のル・マン24時間総合優勝を記録したチーム郷を原点に持つモータースポーツに特化した技術者+職能者集団。その直轄実戦チームとして全日本SF選手権に参戦しているのがTGMグランプリであって、2024年は若手女性ドライバー“Juju”(野田樹潤)を走らせたことでも話題を集めた。A2RL参戦にあたっては、彼らが専門とするレース・エンジニアリング、SF23と装着されるヨコハマタイヤ(ワンメイク)の実走データとその解析などのノウハウを活かす一方、大学や企業ともコラボレーションして、プログラムを進めて行くことになるという。
鈴鹿で見えた現行プログラミングの限界ー運動限界に踏み込む走行にはほど遠い

そこで現状のA2RL車両、自律行動ロボットとしての「ドライビング」だが、最終的にはスピン〜クラッシュまでを演じてくれたわけで、そこに至るまでに鈴鹿サーキットをかなりの時間にわたって専有、走行を繰り返してAIにまずコースを、そしてそこをどう走るかを“学習”させた。とはいえ今回の週末で複数回の走行を観察した範囲では、既存の「自動運転」の範疇を出ていない。つまり画像解析から「どこを通るか」を判断し、そこに向けてあらかじめ速度を調整、目標に向けてステアリングを切り、その結果がどこに向かうかに応じて修正を加えつつ、例えばコーナーでは一定の旋回状態を維持する…という走り方をしていた。
そして、鈴鹿に持ち込まれていた2台のロボットカー仕様のうちの1台が、クビアト操る「ヒューマンカー」との模擬レースを演じるべく走り出して半周行っただけのヘアピンでアンコントロール状態に陥った。そこで起きたことを動画などで確認したところでは…。コーナーを回り込んだ先で脱出加速に移る…というプロセスでリアタイヤが駆動力を受け止めきれず縦滑りを発生。それがまだ旋回運動の中、しかも脱出加速なのに前輪の舵を戻す動作が入っていない。そのままリアは外に流れつつ、フロントは内に切れ込む動きで旋転運動発生。しかしそこまで行っても前輪舵角は戻らず、つまりカウンターステアで前後の横すべりバランスを修正する操作もないままに旋転を続け、ヘアピン立ち上がりイン側のクラッシュバリアにリアからかなりの勢いで衝突した。
何より重要な「タイヤ」のことがわかっていますか?
事後にA2RLから送られたプレスリリースによれば、「リアタイヤの空気圧が予想外に低下したため、おそらくバルブの故障かコース上の破片が原因と思われるが、タイヤ温度が予想以上に低かったことも相まってはスピンを喫した」とのことだが、まずSF23にはタイヤ内圧と内部雰囲気温度を直接計測して車上側に伝えるセンサーが備わっていて、ヒューマンドライバーならばこれをステアリングホイール上のディスプレイで確認しつつ走っている。ピットでモニタリングもしているのだが、車両の“AI”も含めて、そのセンサーデータを刻々“見て”いないのだろうか。
それ以前に、今日のレーシング・スリックタイヤのトレッドコンパウンドはゴムというよりもプラスチックに近いポリマーで、温度があるレンジまで上がるとガラスが溶けるように相変化を起こし、表面が溶けてガムテープ接着面のように路面に粘着する。
A2RLの開発チームは、全日本SF選手権では禁止されているタイヤウォーマーを使ってはいたが、ピットから離れコース上に車両を押し出して準備を進める間はその“ブランケット”を掛けただけで暖めることはできず、タイヤはほぼ冷え切っていたはずで、そこからタイヤを暖める段取りを何もせずにヘアピンまで走っただけでは、トレッドコンパウンドはまだ硬いまま。内圧も横浜ゴム指定の冷間時最低圧力の120kPaからさして上昇していなかったと思われる(実戦走行時のタイヤ内部温度70℃以上、100℃に達することもあって、内圧は170〜180kPaに上昇する)。そこに前日までの走行で“学習”したパターンそのままか、むしろさらに強めのアクセルオンを加えたように見えた。
つまり、このロボット=運転AIに運転の基本を教えた人々は、そうしたタイヤの基礎的な特性や使い方をプログラミングしていないのではないか。それ以前に、教え手側がタイヤについての基礎知識を学んでいない可能性が高い。というのも、デモラン以前の専有走行で使ったタイヤのトレッド面摩耗痕(我々は「お肌」などとも言う)を見ても、表面が本来の溶けゴム状態になった形跡はなく、多少柔らかくなる程度のまま強引に縦・横の滑りを無理やり起こして、表面がむしり取られる摩耗を繰り返したガサガサの摩耗肌になったものばかりだった。

それ以前に、モータースポーツ競技の現場では車両とタイヤをどう準備し、使う段取りを組んでいるか、それ以前にサーキットをどう走るのかというスポーツ・ドライビングの基本などについても「素人」レベルのように見受けられた。最初に教える側がそれらを知らなければ、AIの学習からも抜け落ちるのは当然で、じつは他の分野でもそこが「AIの弱点」になってくる。
ほんとは、「タイヤの摩擦状態を感知する」→「車両運動を組み立てる」
そもそもクルマの運転とは「タイヤの摩擦力を引き出して運動を作る」ことに帰着する。とりわけモータースポーツは、それぞれの状況の中でタイヤの摩擦力を駆動、制動、旋回の全てにおいて最大まで引き出すこと、そして走行中に有効に作用するように引き出した摩擦力の総和、すなわち走行タイムとなるのであって、タイヤを理解せずに、タイヤを使いこなさずに走っても得るものはない。
加えて、ヘアピンでのパワーオン〜リアスライドからそのままスピンに陥ったプロセスは、この運転AIは、四つのタイヤが発生する摩擦力のバランスと車両挙動の関係、つまり車両運動力学の基礎的な概念も教えられていないことが浮かび上がる。前後タイヤの横すべりのバランスを検出し、それを最適化しつつ、狙った軌跡に向けて運動して行くにはどうするか、があらかじめプログラミングされていれば、少なくともリアスライド〜ヨー角速度の増分発生に対して、フロントの舵角は戻るはずなのだから。
そこがわかると、現状のA2RL/ASPIREのSF23ロボットカーは、今日に至る様々な自動運転の試みと全く同様に「視覚情報に頼って速度と進路を決める」「目で見たところに向かってハンドルを切り、動きが合わなければ修正する」という、ドライビングとしては初心者レベルの状態にある、と判断できる。
エキスパートは車両運動を「予測制御」→「運動を感知・フィードバック」している。
これに対してドライビング=車両運動コントロールのエキスパートは、まず「タイヤ(と路面)の摩擦を確かめ」「タイヤがたわみ、摩擦力を発生し始めるプロセスを感じ取りつつ」「どんな運動を組み立てるか、予測して制御を組み立てる」。つまり、ドライビングのすべての基本はタイヤという、きわめて非線形な特性を持つ存在との対話であり、そこから車両の運動を組み立て、コントロールするものなのである。
そこまでを織り込んで、99%(以上)の人間よりも巧みに、正確に車両運動を組み立てることができ、それもウェットから雪氷路までを自在に走ることができて初めて、自動運転車は現実の路上を動く交通手段となりうる。もちろん、周辺状況の認知判断が人間同等かそれ以上にできることは、今、自動運転の開発のほとんどが注力している分野は、その前提条件ではあるが、それだけを追いかけていても「自動車が鉄腕アトムになる日」は来ない。
この、タイヤと車両運動の基礎すらも織り込まないまま、「目で見た状況に合わせて速度を抑え、ハンドルを切る」だけの今日ほとんどの自動運転は、例えばアメリカや中国の「ロボットタクシー」も、2024−25年度から国土交通省他が地域のトライアルを後押ししている「レベル4」のバス類も、ヒトに例えれば「よちよち歩き」に止まる。走行速度が出せないのは当然として、天候が少しでも悪化して「前が見にくい」、路面状態が滑りやすい、などの状況では『運行停止』にせざるを得ない。では「エキスパートはどのようにタイヤを感知し、車両運動を予測制御で組み立てているか」、それを自動運転に織り込むには…については、ご相談ください(笑)。かなりのところまで、答えが見えてきているので。
すなわち、「タイヤを知ること」と「車両運動力学」こそ、ここからの自動運転の開発には必須の領域。ただし、「タイヤの力学的モデル」は、今のところ、ここで使えるような妥当なものはないし、今後も簡単にはできない。でもエキスパート・ドライバーはそれを”感知”している。
そのタイヤの摩擦力の限界領域で、しかも他者と競うレースの形で「自律走行」の開発を実証的に進めるところにこそ、A2RLの本当の価値がある。主催者がそこまで考えているのかどうかはわからないけれども。「ロボットカーによるレース」は三流SF映画の題材にはなるかもしれないが、人々が楽しむエンターティンメントになることはない。そこまで理解した上で、A2RLの現況を見ると、現状の各チームに配布される基本のロボットOSに、タイヤの力学的特性と基礎的な車両運動力学を織り込んだ制御を実現すれば、「勝ち目」はありそうだ。優勝賞金は💲225万(参加にあたってはその5分の1ほどのエントリーフィー+初期費用を払い込む必要あり)と、なかなかの額ではある。
(文・写真:両角岳彦/一部写真提供:JRP)