BEVは全輪駆動車に向いているのか?
ここでちょっと本論から外れて…。
私は、自動車のエンジニアリング、テクノロジーに興味を持ち、自ら体験した現象を技術や理論と照らし合わせて考えることを続けてきているわけですが、その中でもとくに関心の深い分野が「タイヤの力学と車両運動」。
そこで体験し理解が深まってきた「駆動」と「車両運動」の関係について、クルマの電動化について語るついでに、ちょっと触れておきたいと思ったことがあります。もちろん、そうした「通説や既成概念の誤り」は、自動車技術にはそれこそ“山のように”あり、自動車や部品メーカーの企画者・技術者でも、ましてメディアやPRの関係者は、理解できていない話は非常に多いのですが。
ここでお話ししたいのは「4輪駆動」。ごくふつうの説明としては、クルマに、とくに乗用車の場合は前後一対・4本あるタイヤの全てに原動機の力を伝えれば「4輪(全輪)駆動」、つまり「4WD(4-wheel drive)」である、ということになります、が、車両運動の観点から見ると、実際にタイヤと路面の摩擦力の限界付近でクルマを走らせると、そこにもうひとつの要素が加わることで、「4輪を駆動すること」本来の強みが現れるか、「なんちゃって…」程度の機能なのかが分かれます。
それは、それぞれの車輪同士が機構として繋がっているかどうか。

図:Volkswagen
最近は採用例が増えた形態として、前後別々の原動機+駆動機構を組む場合–前後にモーター1基ずつのBEVはもちろんこの形ですが、エンジン+トランスミッションで前輪を駆動し、後輪側にモーターを追加する手法も同様–、これらは、私の観点からすると「4WDならではの長所」のごく一部しか得られません。つまり、積雪などで滑りやすい路面、でもほぼ平滑という条件で、前後どちらか2輪だけの駆動では1輪が滑ると、左右輪の間に組み込んであるデファレンシャルギア(差動歯車)が働いて、その車輪だけが空転して発進が困難、という状況に陥る。そこで他の2輪のほうが少し滑らなければ、そちらでクルマを押すことができる。その動力源がモーターで、空転を検知すると力を絞る制御をすれば、ドライバーのスキルが低く、アクセルを踏んで滑って発進できないともっと踏み込む、さらに空転増加…という反応に陥ってもなんとか動ける。つまり滑りのコントロールが難しい路面で動き出せる、という効能しかないのです。
各輪の間に機械的な連結がなく、それぞれに駆動トルクを与えられて回転する場合(電動駆動の場合は4輪それぞれにモーターを組み込むと、この形は作れます)、どれか1輪でも摩擦があれば、クルマを押すことはできますが、そこで真っ直ぐ進むのは難しい。もちろん各輪の駆動力を増減させる制御はできますが、それは空転や滑りを検出してからの修正。「4輪それぞれにモーターを制御して駆動力を変えれば、ステアリングとは別に“曲がる”動きを制御できる」と、この4輪独立モーターの可能性を語る人も少なくありませんが、それは歩くような速度での話。もう少し速度が出てもなんとかできるとは思いますが、いずれにしてもタイヤの横すべりによって向きを変えたり旋回するための摩擦力を得る領域に入ると、安定した車両運動を作るのは至難の業です。
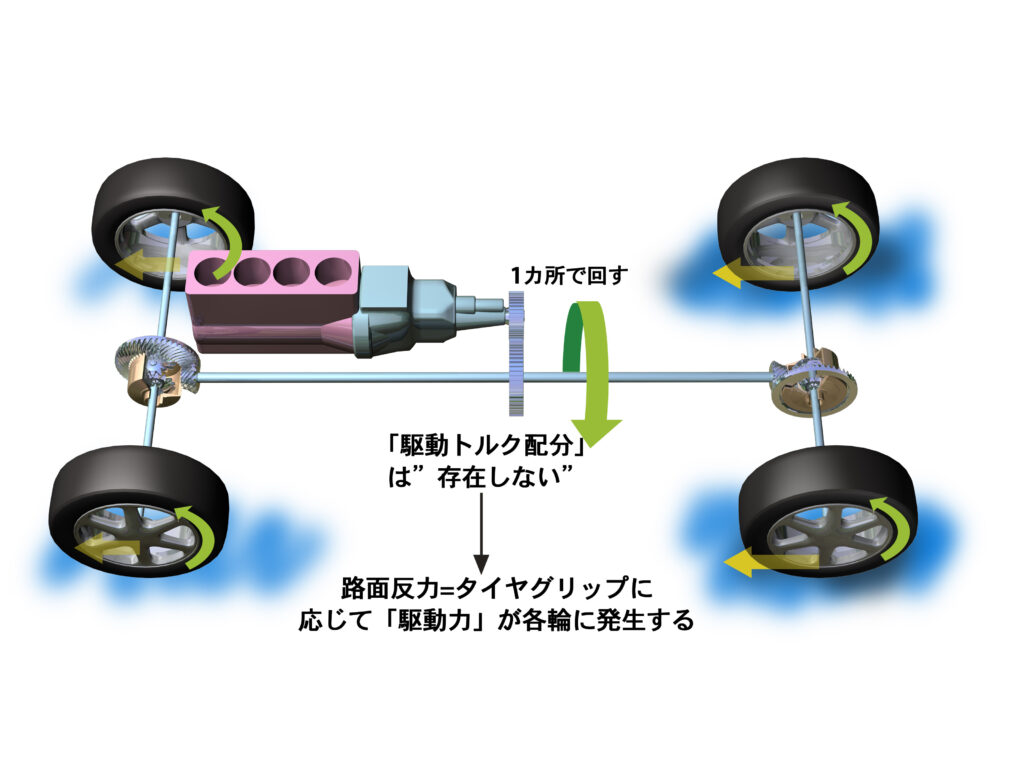
図作成:熊谷敏直
こういう「タイヤが滑る」状態で(じつはタイヤがわずかでも力を生んでいる時は、必ずなんらかの滑りがそこにあるのですが)、まず4つのタイヤによって得られる「クルマを押す力」を最大にするにはどうしたらいいか。これは簡単で、「4輪を機械的に“直結”にする」。
つまり前後軸の間にプロペラシャフトを通して、歯車を介して左右を結ぶ駆動軸を回す。
この状態を「リジッド(直結)4WDと言います。同時に、とくに1輪が脱輪したり、泥の中に埋もれているような時は、左右輪の回転速度差を許容する(差動を起こす)ためのデファレンシャルギアも直結して、左右が1本の軸でつながっている状態にする。これで「4輪が一体に回転する」形態になります。こうなると、1輪だけの空転は起こらず、その瞬間にいちばん高い摩擦を持っているタイヤが路面に駆動を伝え、クルマを押す。しかも他の3輪も同じ回転をするから、ステアリングを保持していれば進路も乱れない。ただこの状態で低速で小さな円を描く旋回をしようとすると、各輪が描く円の大きさが異なり、それぞれに進む距離(円弧の長さ)が異なる、ということは回転速度も異なるのを無理やり同じ回転にしようとするので、最も遅く回る車輪が他の車輪に強烈なブレーキとして働いてしまう。これを「タイトターン・ブレーキング」と言い、日常走行の中でそれが出ては困るので、まず左右輪の間にはデファレンシャルギアが入っています。前後軸の間は切り離せるようにクラッチなど断続機構を組み込む。ほんとうは前後間にも差動制限機能を持つデファレンシャルギアを組み込むのが、車両運動の総合能力を高めるためにはベストなのです。
ここまでは「低速走行での車両運動」の話。でもじつはもっと大事なのは、速度が上がり、まずは40〜50km/hからさらにはそれぞれの最高速域まで、4輪に駆動力を伝える機構を持つクルマは、まっすぐ走る時はもちろん、旋回運動をしている中でも、車輪それぞれの回転速度が瞬間的に変動する(摩擦の食いつき・滑りの変化や、たとえば路面の細かな突起を踏んだ時にもこの回転速度変動が起こります)と、それが駆動伝達メカニズムを通して他の車輪に瞬時に伝わります。1本の棒の両端を別々の人が握っていて、一端を持つ人がちょっとでもねじると、反対端を持っている人にその変化が伝わるのと同じ現象。力の変化を共有し、回転変動を押さえるので、クルマの挙動がふらついたり旋転運動に入りそうになるのが抑えられる。雪氷の上で安定した走り、そこでタイヤが滑りつつ運動するクルマの挙動を操る時はもちろん、雨の高速道路などでドライビングが難しい時にも落ち着いた動きで安心感のある走り、などがもたらされます。
それぞれの車輪の回転を検出し、その変化に応じて次に起こす回転を制御する、というやり方では、どんなに速く制御をしても、この「4輪どこかに加わった力(回転力)の瞬時のやりとり」はできません。つまり、4輪駆動システムが生み出すクルマとして本来の走りの資質を実現するためには、前後別々、さらには4輪別々のモーター駆動ではなく、4輪の間を歯車や回転軸のような「機械機構」で結ぶことが不可欠。これが私の結論です。


図:図解・自動車のテクノロジーより(作図:篠崎均)
もちろん、いざという時に助けになる(こともある)という狙いで、機械的結合はないけれども、2輪ではなく4輪に駆動力を分散するシステムを選ぶのであれば、それなりの価値はあることは否定しません。
そもそも、道路というものは舗装されて平坦に見えても、4つのタイヤが踏んでいる場所の路面の細かな凹凸や粗さ、平面度がまったく同じということはありえません。そこで起こる細かな回転の違いが、とくに左右輪の間で自由に起きてしまうと、走るクルマの進路はふらつきます。これを抑えて素直に「まっすぐ走らせる」のは、左右独立(モーター)駆動ではきわめて難しい。左右の車輪をつなぐ軸とその中に組み込む差動歯車、つまりデファレンシャルギアが入れば、それが「まっすぐ走る」挙動の安定を生み出してくれる。電動駆動車両を作ろうという企画者、技術者は、この「車両運動の基本」を知っていてほしいものです。<続く>
(両角岳彦)